Deptº de Engª
Electrotécnica e de Computadores
Secção de Sistemas e Controlo
TRABALHOS FINAIS DE CURSO
Áreas : Visão por Computador e Visão Robótica
2005/2006
1)Visual
Object: Detecção e Reconhecimento Visual de Objectos
2)Omni-Sonda: Câmara de Visão Omnidireccional
para Inspecção Visual
3)VideoBlimp: VideoBlimp: Dirigível
Autónomo controlado por Visão
Detecção
e Reconhecimento Visual de Objectos
(Visual-Object)
OBJECTIVOS:
Com este trabalho pretende-se desenvolver e implementar rotinas de visão de
computador que permitam a (i) caracterização de objectos ou cenas observadas e
(ii) o posterior reconhecimento desses objectos ou cenas.
Enquadramento
e Descrição
| Este trabalho enquadra-se no desenvolvimento de robots
humanóides com capacidade de interagir com objectos, outros robots e
pessoas.
Dada a complexidade destes sistemas, tem-se procurado perceber como os
bébés humanos aprendem e se desenvolvem ao longo do tempo.
Identificam-se três fases principais:
Auto-conhecimento: os bebés aprendem a controlar o seu próprio
corpo.
Interacção com objectos: assim que conseguem dominar o controlo do
próprio corpo, os bebés interessam-se por objectos e sua
manipulação. Interacção social: gradualmente os bebés
começam a interessar-se por outros bebés/crianças ou adultos aprendendo
por imitação a executar tarefas complexas.
|

|
Com este trabalho pretende-se abordar a fase de desenvolvimento que
corresponde à exploração e interacção com objectos através da capacidade
visual. Para tal, o sistema tem que ser capaz de aprender representações
discriminativas de um dado objecto e dispôr de métodos que permitam reconhecer
estes objectos. A dificuldade fundamental resulta da necessidade destas
representações serem independentes (ou tolarantes) a variações de
iluminação, perspectiva, etc.
O método fundamental a aplicar encontra-se descrito em [4] e designam-se por
SIFTs "Scale Invariant Feature Transform". Essencialmente, esta
abordagem permite transformar uma imagem numa colecção de características
locais da imagem (feature vectors) que são invariantes ao escalamento,
translação e rotação da imagem. São ainda parcialmente invariantes a
mudanças de iluminação ou a deformações afins da imagem.
As características invariantes à escala, podem ser detectadas de forma
eficiente com um banco de filtros. O primeiro nível identifica pontos que
correspondam a pontos-chave no espaço de escalas, i.e. que sejam extremos de
aplicação à imagem de um filtro do tipo diferença de gaussianas.
Cada ponto de interesse assim detectado é utilizado para descrever
localmente a região de imagem normalizado pela escala e invariante à rotação
e translação.
Para reconhecer um objecto ou uma cena, é necessário comparar os
descriptores locais do objecto de interesse e das imagens observadas. Este
processo pode ser feito recorrendo a um processo de clustering e de ajuste de
mínimos quadrados. O número de SIFTS que sejam comuns no objecto e na imagem
indicia a presença ou não dese objecto na imagem.
Este método poderá ser implementado recorrendo a informação de cor ou
comparado com outros métodos mais recentes.
Referências
[1] A Developmental Roadmap for Task Learning by Imitation in Humanoid
Robots: Baltazar's Story, M. Lopes, A. Bernardino and J. Santos-Victor ,AISB
2005 Symposium on Imitation in Animals and Artifacts, University of
Hertfordshire, UK, 12-14 April 2005.
[2] - An anthropomorphic robot torso for imitation: design and experiments, M.
Lopes, R. Beira, M. Praça, J. Santos-Victor, IROS - IEEE/RSJ International
Conference on Intelligent Robots and Systems, Sendai, Japan, September 28 -
October 2, 2004.
[3] - http://www.cs.ubc.ca/~lowe/keypoints/
[4] - Distinctive image features from scale-invariant keypoints, David G. Lowe,
International Journal of Computer Vision, 60, 2 (2004), pp. 91-110.
[5] - Object recognition from local scale-invariant features, David G. Lowe,
International Conference on Computer Vision, Corfu, Greece (September 1999), pp.
1150-1157.
[6] - Local feature view clustering for 3D object recognition, David G. Lowe,
IEEE Conference on Computer Vision and Pattern Recognition, Kauai, Hawaii
(December 2001), pp. 682-688.
[7] - RobustWide Baseline Stereo from Maximally Stable Extremal Regions, J.
Matas, O. Chum, M.Urban1, T. Pajdla. British Machine Vision Conference, 2002.
[8] - http://user.cs.tu-berlin.de/~nowozin/autopano-sift/
Ramos (por ordem de preferencia):
N.de elementos do grupo: 1 ou 2
Local : O trabalho decorrerá nos laboratórios da Área Científica de
Sistemas, Decisão e Controlo ou no VisLab
- Laboratório de Visão por Computador do ISR.
(Omni-Sonda)
Objectivos:
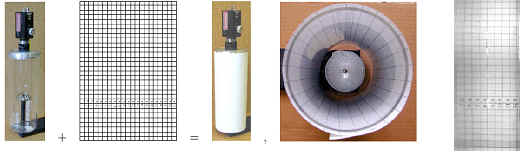
Neste trabalho pretende-se (i) desenhar e construir uma câmara
catadióptrica (com espelhos) que forneça imagens rectificadas de superfícies
cilindricas e (ii) desenvolver algoritmos de mosaicos por forma a gerar uma
imagem estendida da superfície cilindrica observada.
Enquadramento e Descrição:
A utilização de câmaras de vídeo tem aumentado nos últimos anos em
inúmeras aplicações. Apesar disso, na maior parte das aplicações
utilizam-se o mesmo tipo de câmaras apesar dos requisitos das aplicações
variarem muito. A possibilidade de desenhar uma câmara cuja geometria se adapte aos cenários
observados permite a captura de imagem em muito melhores condições do que se
utilizarmos câmaras standard.
A possibilidade de desenhar uma câmara cuja geometria se adapte aos cenários
observados permite a captura de imagem em muito melhores condições do que se
utilizarmos câmaras standard.
Neste trabalho pretende-se desenvolver uma câmara específica para a
observação ou inspecção de estruturas tubulares, embora os conceitos possam
ser generalizados a outras situações. Essa câmara consistirá no conjunto de
uma cãmara de vídeo e um espelho convexo. Exemplos de aplicações seriam a
inspecção de condutas (água, gás, túneis, etc) ou sensores endoscópicos.
Uma forma de construir câmaras com características geométricas não
convencionais consiste na utilização de um espelho convexo, em conjunto com
uma câmara de video standard. Desta forma, a formação de imagem faz-se
atavés de raios ópticos que emanam de pontos no espaço tridimensional,
reflectem-se na superfície do espelho e, finalmente, atingem o plano de imagem,
como ilustra a figura ao lado.
A forma do espelho é pois determinante neste processo de formação de
imagem. Neste trabalho o desenho da câmara consiste na resolução do problema
inverso de determinar a forma da superfície do espelho por forma a garantir que
a imagem de um cilindro é rectificada na imagem capturada pela câmara. Por
outras palavras, em vez da imagem "afunilada" que se obtém capturando
uma imagem do interior de um tubo com uma câmara convencional, este processo
permitiria a obtenção de uma imagem não distorcida do interior do tubo.
Uma vez desenhada e construída a câmara (espelho) com estas característica
o segundo passo deste trabalho consiste no desenvolvimento de algoritmos de
construção de mosaicos vídeo que possa alinhar e concatenar as várias
imagens adquiridas ao longo do tempo quando a câmara observa uma estrutura
tubular.
Referências
[1] - Constant Resolution Omnidirectional Cameras, José Gaspar, Claudia
Deccó, Jun Okamoto Jr, José Santos-Victor, OMNIVIS'02 - Workshop on
Omnidirectional Vision, held with ECCV, Copenhagen, Denmark, June 2002.
Ramos (por ordem de preferencia):
N.de elementos do grupo: 1 ou 2
Local : O trabalho decorrerá nos laboratórios da Área Científica de
Sistemas, Decisão e Controlo ou no VisLab
- Laboratório de Visão por Computador do ISR.
(VideoBlimp)
Objectivos:
Com este trabalho pretende-se desenvolver e implementar (i) rotinas
de visão de computador e processamento de imagem e vídeo (tracking) e (ii)
utilizar esta informação visual para o controlo do dirigíveil equipado com
uma câmara a bordo.
Enquadramento
e Descrição:
Veículos autónomos aéreos do tipo dirigível podem
ser utilizados em diversas tarefas de vigilância e monitorização ambiental
onde a presença humana pode não ser possível ou desejável. Estes veículos,
ao contrário de outros (p.ex. helicópteros), são silenciosos e inerentemente
estáveis o que simplifica a sua utilização e reduz o seu custo. A sua
utilização pode ser muito vantajosa em aplicações que exijam baixas
velocidades e baixos níveis de ruído, para alem de manobrabilidade e
estabilidade. Uma das aplicações possíveis é o da monitorização de grandes
espaços ou missões de busca e salvamento ou monitorização de autoestradas.
| Este trabalho parte da existência de um dirigível
autónomo de cerca de dois metros de comprimento, equipado com uma micro
câmara, transmissor de video e três motores comandados via rádio. Um
estação fixa, composta por um PC com receptor de video e controlo
remoto dos motores permite a operação do veículo de um mode remoto e
completamente autónomo.
Pretende-se desenvolver, implementar e caracterizar um sistema de
controlo de um dirigível do tipo descrito anteriormente, utilizando a
informação vídeo obtida da micro câmara a bordo. Nomeadamente
pretende-se desenvolver sistemas de controlo que permitam implementar
alguns comportamentos de navegação do tipo: estabilização,
seguimento de objectos, atracagem a superficies, entre outras. |
 |
O
trabalho a desenvolver será baseado em trabalho realizado anteriormente num TFC
e numa tese de Mestrado. Esse trabalho incluía já um simulador MatLab/Simulink
do sistema dirigível + câmara de vídeo e de algoritmos de controlo em malha
fechada usando a visão.
No
final do TFC os alunos intervenientes terão enriquecido a sua experiência nos
seguintes campos:
* Visão por computador
* Controlo de sistemas dinâmicos
* Operação de robots aéreos não holonómicos
* Controlo por computador em tempo-Real
Referências
[1] - Vision Based control of an Autonomous Blimp (VIDEOBLIMP),, Filipe
Manuel da Silva Metelo, Luís Ricardo Garcia Campos, Final Year Project, IST,
September 2003.
[2] - Vision Based Station Keeping and Docking for Floating Robots, Sjoerd van
der Zwaan, MSc. Thesis, IST, May 2001.
[3] - Visual station keeping for floating robots in unstructured environments,
Sjoerd van der Zwaan, Alexandre Bernardino, José Santos-Victor, Robotics and
Autonomous Systems (Elsevier), 39(3-4), June 2002.
[4] - Real-time Vision-based Station Keeping for Underwater Robots, Sjoerd van
der Zwaan, José Santos-Victor, - IEEE OCEANS 2001, Honolulu, November 2001.
[5] - Vision based station keeping and docking for an Aerial blimp, Sjoerd van
der Zwaan, Alexandre Bernardino, José Santos-Victor, Intl Conference on
Intelligent Robots and Systems IROS'2000, Kagawa University, Takamatsu, Japan,
Oct 30 - November 5, 2000
[6] - Control of an Aerial blimp based on visual input, Sjoerd van der Zwaan,
Matteo Perrone, Alexandre Bernardino, José Santos-Victor, 8th International
Symposium on Intelligent Robotic Systems - SIRS200 - Reading, UK, July 2000
Ramos (por ordem de preferencia):
N.de elementos do grupo: 1 ou 2
Local : O trabalho decorrerá nos laboratórios da Área Científica de
Sistemas, Decisão e Controlo ou no VisLab
- Laboratório de Visão por Computador do ISR.
Para
mais informações
José Santos-Victor,
Email: jasv@isr.ist.utl.pt,
Ext. 2294
Alexandre Bernardino, Email: alex@isr.ist.utl.pt,
Ext. 2293
José António Gaspar , Email: jag@isr.ist.utl.pt,
Ext. 2293